首页 > 产品中心 > OmniPartner复合机器人 > HTP系列
- 产品中心
- OmniPartner复合机器人
- HTP系列
- HTM系列
- UR机械臂
- OmniTurtle全向车
- OmniTitan重型运输车
- 自动导引运输车(AGV)
- 机器人平台
- 应用机器人系统
- 全向轮
- 锂带挤出生产系统
- HTP系列复合机器人

- 产品简介
- HTP系列复合机器人,Navigator Q2与UR3的完美结合。车体Navigator Q2是四轮45度全向轮轮系的机器人平台,使用航发公司的QMA-15全向轮,与传统轮系相比,能够实现平移、自转、平移并自转等特殊运动。平台底盘采用整体铝合金铸造成型工艺,并具有液压避震悬挂系统,使用四台大功率的空心杯电机作为驱动,并配有独立的伺服驱动器,高阶运动控制器集成了多种运动控制功能,支持CAN总线及RS232接口。上层采用6轴台式协作机器人,所有腕关节可360°旋转,末端关节科无线旋转,可重复精度±0.1mm,编程简单,分布灵活,高效节能。开发包向用户提供完整的设备通信协议以及基于STM32F407的示例与演示程序源码,使用户能够快速上手。
- 特性
- 全方向自由移动铝合金整体成型底盘液压阻尼避震,四轮独立悬挂工业级全向轮空心杯直流伺服电机伺服驱动器多功能运动控制器DEMO开发板及应用代码六轴高精度机械手臂
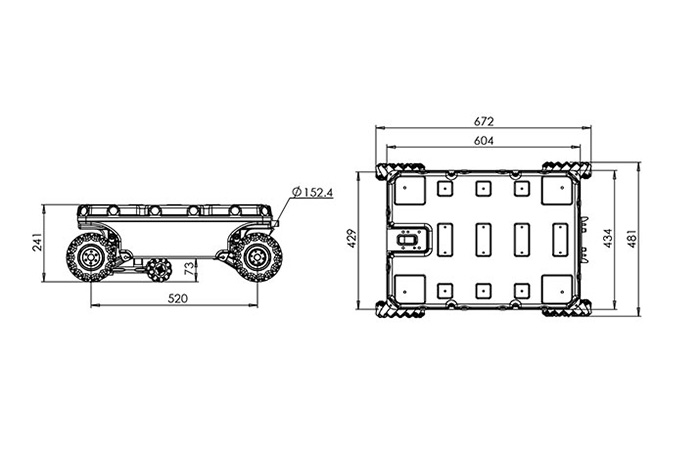
- 外形尺寸
- 型号参数
-
UR3 参数 有效负载 3KG 自重 11KG 有效工作半径 500mm 关节范围 ±360°,第六轴无限旋转 速度 所有关节:360°/s,肩、肘、基座关节:180°/s,工具端: 1 m/s 重复精度 ±0.03mm(按照ISO9283标准 底座安装面积 直径128mm 自由度 6个旋转关节 控制箱尺寸
(宽x高x长)475mm x 423mm x 268mm I/O端口 控制箱 工具端 数字量输入 16 2 数字量输出 16 2 模拟量输入 2 2 模拟量输出 2 - I/O电源 控制器24V 1200mA,工具端12/24V 600mA 通讯 TCP/IP 100Mbit:IEEE 802.3u,100BASE-TX以太网借口&Modbus TCP 编程 polyscope图形化用户界面,12"触摸屏带安装支架 噪音 噪声小 防护特级 IP64 功耗 运行典型的程序时大约100W 材质 铝合金,ABS塑料,PP塑料 温度 机械臂能操作在温度范围0-50°C 电源供应器 100-240V/AC,50-60Hz 电缆 连接机器人和控制箱的电缆(6米),连接触摸屏和控制箱的电缆(4.5米) Navigator Q2 参数 机身形式 铝合金一体型 外形尺寸 672×481×241 驱动轮 QMA-15全向轮 驱动轮直径 152.4mm 车身最小离地间隙 73 整机重量 32KG 额定负载能力 80KG 电机类型 空心杯直流
伺服电机电机额定功率 90W 电机编码器 500线/转,A、B相输出 电机数量 4 电机驱动 伺服驱动器,CAN总线、RS232通信接口 最大移动速度 1.2m/s 最大自转速度 145°/s 最小转弯半径 0m 适应地形 室内、室外坑陷较少的水泥及沥青路面 典型续航时间 约10h(负载10kg,运行速度1m/s,运行率70%) 待机时间 >30h 车载电源输出 5V@5A / 12V@5A / 电池电压(22.4~29.2V)@>10A 电源保险管
预设规格5×20/20A 电池 24V/18.2Ah锂离子电池 电磁快速更换 支持 机身形式 铝合金一体型 外形尺寸 铝合金一体型 充电器 输入:AC100V~240V / 充电电流:5A / 接口:直插式 DEMO开发板 RHF407开发板(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,USB×1,ADC×8,DAC×2,PWM×8,LED×2,按键×2, 独立I/O×24,可复用I/O×29,TF卡接口×1,RTC后备电池座,可复用TFT LCD接口×1)
- 典型部件
-

- QMA-15全向轮
- QMA-10工业级全向轮,是航发公司经典系列的全向轮产... 详情

- HFmotor-3590空心杯直流伺服电机
- QMA-10工业级全向轮,是航发公司经典系列的全向轮产... 详情

- 伺服驱动器
- QMA-10工业级全向轮,是航发公司经典系列的全向轮产... 详情

- MOTC1运动控制器
- QMA-10工业级全向轮,是航发公司经典系列的全向轮产... 详情

- RHF407开发板
- QMA-10工业级全向轮,是航发公司经典系列的全向轮产... 详情

- ULB-16超声测距传感器
- QMA-10工业级全向轮,是航发公司经典系列的全向轮产... 详情

- OFPS增量式全场定位装置
- QMA-10工业级全向轮,是航发公司经典系列的全向轮产... 详情

- ACDS自动充电对接装置
- QMA-10工业级全向轮,是航发公司经典系列的全向轮产... 详情
- 产品展示
-
 产品实景图
产品实景图 产品实景图
产品实景图 产品实景图
产品实景图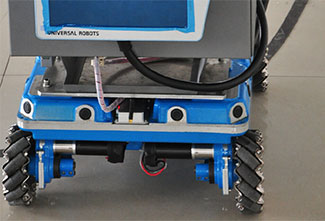 产品实景图
产品实景图
- 典型研究与应用领域
- 模式识别技术研究 电子工程实验 搬运与仓储应用 路径规划技术研究 机械工程实验 监控与侦查应用 自动驾驶技术研究 嵌入式系统开发与实验 机器人竞赛 传感器技术研究 图像处理技术研究 地图绘制应用 人工智能技术研究 多机器人合作技术研究 柔性制造系统应用
- 文档下载
- Navigator Q2.pdf
- 成都航发液压工程有限公司
- 地址:四川成都·成都现代工业港北区港北三路 220号
- 机电设备联系人 - 韩经理:15528235705
- 机电设备联系人 - 罗经理:18980419041
- 电话: 028-87893560 / 87893562 / 87893538
- 传真: 028-87893539 / 87893748
- 邮箱: 958451179@qq.com
- 网址: www.hangfa.com
-
[蜀ICP备11011463号] 成都航发保留所有权利
