首页 > 产品中心 > OmniPartner复合机器人 > HTP系列
- 产品中心
- OmniPartner复合机器人
- HTP系列
- HTM系列
- UR机械臂
- OmniTurtle全向车
- OmniTitan重型运输车
- 自动导引运输车(AGV)
- 机器人平台
- 应用机器人系统
- 全向轮
- 锂带挤出生产系统
- UR机械臂
- 产品简介
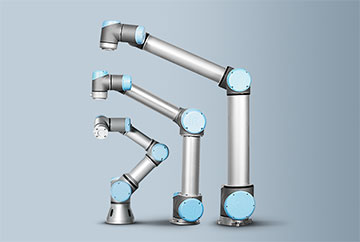
- 优傲机器人引领了一个崭新的工业自动化时代,作为最轻的可台面安装的6轴关节机器人,在紧凑环境中应用,提供了无与伦比的灵活性和定位精度。它非常适合自动化精密工作,在这样的工作场合,可以看到人与机器人并肩工作。
- 特性
- 易编程快速设置无限旋转灵敏的力反馈特征可自我调节的安全力控制复杂应用中的精密操控灵活生产的便捷性优化生产的可靠性
- 型号参数
-
UR3-6关节机械臂 UR5-6关节机械臂 UR10-6关节机械臂 有效负载 3KG 5KG 10KG 自重 11KG 18.4KG 28.9KG 有效工作半径 500mm 850mm 1300mm 关节范围 ±360°,第六轴无限旋转 ±360° ±360° 速度 所有腕关节:360°/s
肩、肘、基座关节:180°/s
工具端TCP速度:1m/s关节:最大180°/s
工具端速度:1m/s基座与肩部:120°/s
肘部、手腕1、手腕2、手腕3:180°/s
工具端速度:1m/s可重复精度 ±0.03mm(按照ISO9283标准) 底座安装面积 ∅ 128mm ∅ 149mm ∅ 170mm 自由度 6个旋转关节 控制箱尺寸
(宽x高x长)475mm x 423mm x 268mm I/O端口 控制箱 工具端 数字量输入 16 2 数字量输出 16 2 模拟量输入 2 2 模拟量输出 2 - I/O电源 控制器24V 1200mA,工具端12/24V 600mA 通讯 TCP/IP 100M兆通讯,适用IEEE 802.3u标准,适用100BASE-TX通讯介质标准
以太网socket连接和Modbus TCP连接编程 polyscope图形化用户界面,12英寸触摸屏带安装支架 噪音 低 防护特级 IP64 IP54 IP54 功耗 一般程序大约100瓦特 一般程序大约200瓦特 一般程序大约350瓦特 人机协作 15个高级安全配置功能 材质 铝合金,ABS塑料,PP塑料 温度 机械臂能操作在温度范围0-50°C 电源供应器 100-240V/AC,50-60Hz 电缆 6米数据线(从机器臂到控制箱)
4.5米数据线(从触摸屏到控制箱)
- 产品展示
-
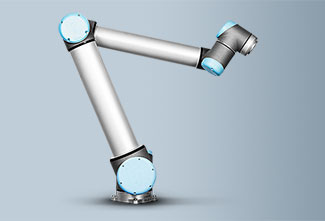 产品实景图
产品实景图 产品实景图
产品实景图 产品实景图
产品实景图 产品实景图
产品实景图
- 典型应用领域
-
- 工业执照领域
- 自动化生产线中的点焊、弧焊、机械手喷漆、切割、电子装配及物流系统的搬运、包装
- 军事领域
- 无人侦察机、拆除炸弹的机器人及扫雷机器人等
- 医疗领域
- 智能医疗机器手
- 娱乐领域
- 文档下载
- UR3机械臂.pdf
- 成都航发液压工程有限公司
- 地址:四川成都·成都现代工业港北区港北三路 220号
- 机电设备联系人 - 韩经理:15528235705
- 机电设备联系人 - 罗经理:18980419041
- 电话: 028-87893560 / 87893562 / 87893538
- 传真: 028-87893539 / 87893748
- 邮箱: 958451179@qq.com
- 网址: www.hangfa.com
-
[蜀ICP备11011463号] 成都航发保留所有权利
