Home > Product > robot > Discovery series > Discovery C1
- Product
- 锂金属挤压机
- 锂金属挤压机
- 锂金属挤压机-->Robot
- Navigator series
- Navigator Q1
- Navigator Q2
- Navigator C1
- Navigator C2
- Navigator L1
- Compass series
- Compass Q1
- Compass Q2
- Compass C1
- Compass C2
- Compass L1
- Discovery series
- Discovery Q1
- Discovery Q2
- Discovery C1
- Discovery C2
- Discovery L1
- Customized robot
- Robot arm
- EAR Series
- IAR Series
- Accessaries
- HMC-1 remote control handle
- ULB-16 Ultrasonic Distance-measuring Sensor
- ULB-1
- LPC-16 patrol sensor
- RHF407 Development Board
- ACDS Automatic charging docking device
- OFPS Incremental Omnibearing locating device
- HF DC Sever Motor
- OtherAccessories
- 锂金属挤压机
- 锂金属挤压机
- 锂金属挤压机-->Omniwheel
- 锂金属挤压机
- 锂金属挤压机
- 锂金属挤压机-->Hydraulic&Customized Equipments
- Discovery C1

- Product Description
- The Discovery series is a small economical robot platform. It aims to provide users with a complete mobile robot system with high reliability and multiple interfaces. Discovery C1 is robot platform with two HSL-10 inflatable rubber driving wheels manufactured by Hangfa Hydraulic Engineering Co., Ltd. (Chengdu)and two QL-08 omni wheels with coaxial tilting suspension, which can adapt to all kinds of working environment and complete all kinds of sports efficiently.Discovery C1 uses two high-power coreless motors as the driver, equipped with multi-axis servo driver, supporting both CAN bus and RS232 interface. The development kit provides customers with a complete equipment communication protocol, and also provides examples and demo application source code based on STM32F407, which allows users quickly know how to operate Discovery C1.
- Feature
- omni driven wheelgear train with bearinginflatable rubber wheelcoreless DC servo motorservo driverdemo application source code based on STM32F407driven wheel coaxial tilting suspension
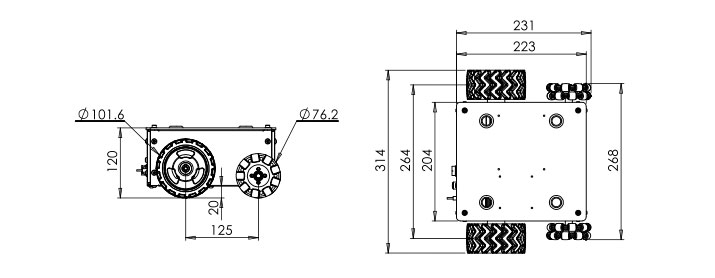
- dimension
- Detailed Images
-
body structure: aluminum alloy molding whole shape dimension: 231*314*120mm driving wheel: HSL-10 rubber wheel diameter of driving wheel: 101.6mm drive mode: two-wheel independent drive coaxial tilting suspension driven wheel coaxial tilting suspension minimum space between robot to ground: 20mm gross weight: 7kg rated load capacity: 10kg motor type: coreless DC servo motor rated power of the motor: 17W motor encoder: 500 line/rev, A、 B phase output quantity of motors: 2 motor driver: servo driver, supporting both CAN bus and RS232 interface maximum translational speed: 0.65m/s maximum rotation speed: 280°/s minimum turning radius: 0m adaptive ground: indoor,bituminous ground ,concrete ground with little depression typical duration time: >10h(load capacity 10KG,moving speed 1m/s,moving rate70%) standby time: >30h support electricity output: 5V @2.5A*2/battery voltage(9.6~12.6V)@>5A The default specification of The power of insurance tube: 5×20/10A bettery capacity: 12V/10.4Ah lithium-ion battery battery fast change: support battery charger: charger input voltage:AC100V~240V Charging current:5A Interface:direct plug-in DEMO development board: RHF407development board(CAN×2,RS232×2,TTL×1,RS485×1,SPI×1,I2C×1,USB×1,ADC×8,DAC×2,PWM×8,LED×2,Button×2,IndependenI/O×24, Reusable I/O×29,TF interface×1,RTC battery back seat,ReusableTFT LCD interface×1) accessories: battery charger、ULB-1ultrasonic sensor×3
- Typical parts

- HSL-10 inflatable rubber wheel
- QMA-10 Industrial Omni wheel, is the HANGFA company classic series Omni-directional wheels...Details

- IMDR4 servo motor
- QMA-10 Industrial Omni wheel, is the HANGFA company classic series Omni-directional wheels...Details

- RHF407 development board
- QMA-10 Industrial Omni wheel, is the HANGFA company classic series Omni-directional wheels...Details

Faulhaber3242coreless DC servo motor- QMA-10 Industrial Omni wheel, is the HANGFA company classic series Omni-directional wheels...Details

- ULB-1 ultrasonic range-finding sensors
- QMA-10 Industrial Omni wheel, is the HANGFA company classic series Omni-directional wheels...Details

- QL-08omni wheel
- QMA-10 Industrial Omni wheel, is the HANGFA company classic series Omni-directional wheels...Details
- Display
-
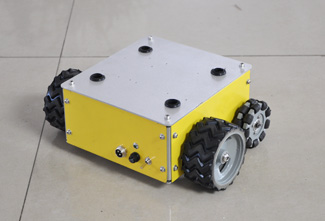 Realistic picture
Realistic picture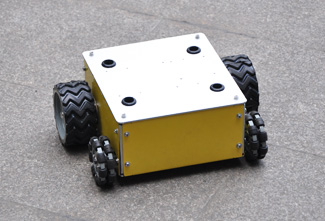 Realistic picture
Realistic picture Detailed picture
Detailed picture Detailed picture
Detailed picture - Application&Research
- Pattern recognition technology research Electronic engineering experiment Carrying and storage applications Route planning technology research Mechanical engineering experiment Monitoring and investigation application Automatic driving technology research Embedded system development and experiment The robot competition Sensor technology research Image process technology research Mapping application Artificial intelligence research Multi-robot cooperation technology research Flexible manufactur system application
- Accessories
- 1.HMC-1 remote control handle LPC-16 patrol sensorULB-1 ultrasonic range-finding sensorsLaser radarGPS locatorKinect device body sensor
- Document download
- Discovery C1.pdf
- Hangfa Hydraulic Engineering Co., Ltd. (Chengdu)
- Address: No. 220, Gangbei 3rd Road, North Area, Chengdu Modern Industrial Park, Pi, Chengdu
- Tel:028-87893560 / 87893562
- Fax:028-87893539 / 87893748
- E-mail:958451179@qq.com
- Website:www.hangfa.com
- [蜀ICP备11046941号] ©2014 Hangfa Hydraulic reserves all rights